「体系的ロボット学」の構築
ロボット工学は、制御工学、力学、材料学から医学、心理学、社会学まで様々な分野の知識を融合した学問です。また、ロボット技術の開発の裏には、技術者達の培ってきたノウハウが詰まっており、その体系は煩雑であり未だ整理されているとは言い難い状況にあります。そこでグローバルロボットアカデミアでは、社会の様々な問題にロボット技術を適用するには、実践的ノウハウの伝授と共に「学理」の裏付けが不可欠であると捉え、ロボット技術の原理と体系を整理した「体系的ロボット学」の構築に取り組んでいます。
新しいロボット学の教科書「RT Pedia」
RTPedia は、ロボット技術を整理し体系化することを目的とした新しいロボット学の教科書です。ロボット工学は日進月歩であり、一般的な教科書のように紙媒体で発行したとしてもその情報はすぐに過去のものとなります。そこで常に最新の情報を掲載することを実現するために、RT Pedia は教科書の形態として Wiki形式のウェブテキストという形態を採用しています(図 1)。この形態により、(1) 更新が早い、(2) 世界中どこからでもアクセス可能、(3) 拡張性が高い、(4)教科書の構成の変更が容易、という利点が得られ、ました。RTPedia はこれらの特徴を有することで、掲載記事の更新だけでなく知識の分類を更新することで、最新の情報に基づいたロボット工学の体系化を行うことを可能としています。
体系化の試みとして、現在行っているのは「ポータル」の構築です( 図 2)。複合分野であるロボットは他分野と比べ一つの指標で体系化することは困難です。ポータルは、ロボット工学を一つの指標ではなく複数の指標で体系化するために設けられた RTPedia 特有の分類方法であり、多角的視点から研究事例のアナリシスと各アナリシスの関係性の記述を目指しています。現在は、「研究室別」「学問分野別」「アプリケーション」などのポータルを設定しており、それらのポータルに基づき教科書の記事を分類し、さらに互いをハイパーリンクで繋ぐことで多様なロボットを横断的に知ることができます。これは紙の教科書では不可能な仕組みです。例えば、医療用ロボットやリハビリ用ロボットなどのアプリケーションの視点で調べたいならば「アプリケーション」のポータルを活用し、制御工学や電気工学など学問分野の視点で調べたいならば「学問分野別」のポータルを活用するなどの利用方法が可能となります。
Fig. 1 RT Pediaメインページ
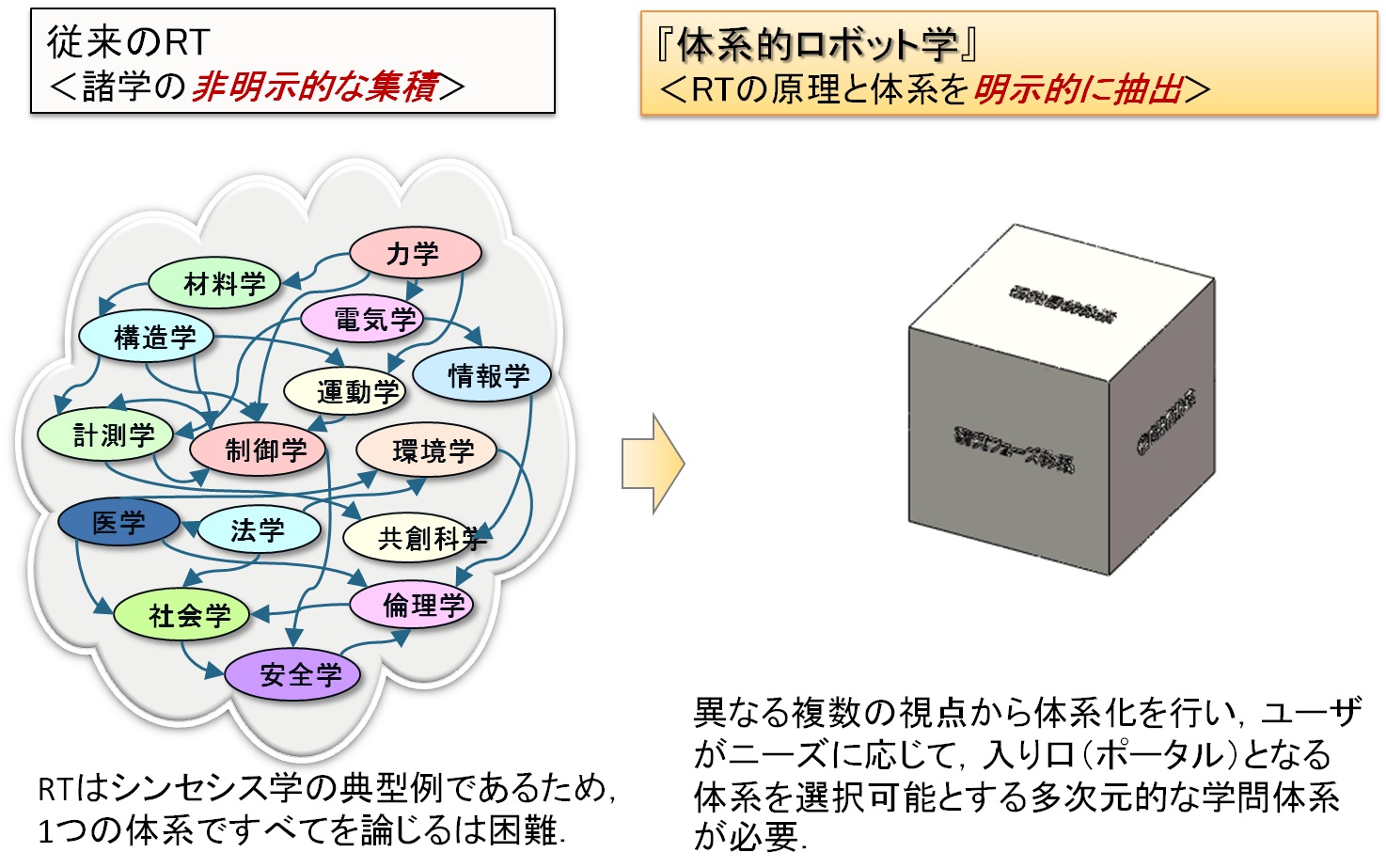
Fig. 2 ポータルの概念
