グローバルロボットアカデミアの研究活動を研究室ごとに簡単にご紹介します。
研究室名の頭文字
あ行 か行 さ行 た行 な行 は行 ま行 や行
あ行
本研究室は、次の2チームで研究を行っています。
1)超電導応用機器:超電導送電ケーブル、超電導コイルを用いた電力貯蔵システム、核融合実験炉用超電導コイル、がん治療用粒子線超電導加速器、高磁場 MRI 等の研究・開発を行っています。
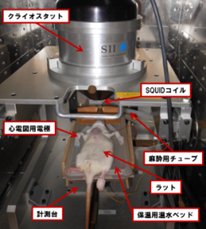
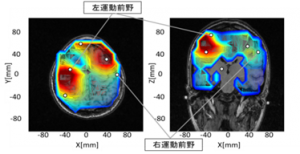
2)生体機能計測:SQUID(超電導量子干渉素子)磁気センサーを用いた生体磁気計測、脳磁図(MEG)や脳波(EEG)計測による脳機能解明や脳情報のリアルタイム抽出、小動物心磁図(MCG)計測などを行っています。
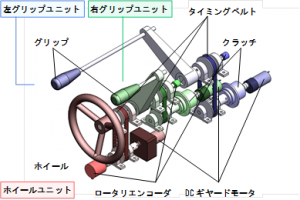
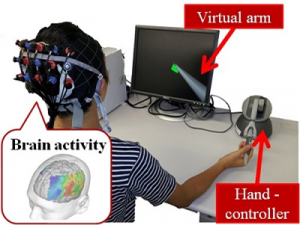
人間を支援するロボット技術(Robot Technology;RT)をキーワードに、人間の知覚・運動機能の補助や生活支援を行える新しいRTを開発しています。特に近年では、脳卒中片麻痺者のリハビリ効率を飛躍的に向上させる、新しいリハビリ支援装置(知覚支援RT)を提案しています。家事や介助を支援する人間共存RT、重機操作スキル向上支援RT、遠隔救命のためのポータブル診療RTの研究で得た知見も取り入れつつ、人間が自身の能力を最大限に活用するためのRTを開発し、社会に提供していきたいと考えています。
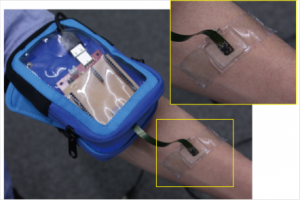
岩瀬研究室では、MEMS (Micro Electro Mechanical Systems) 技術を用いて、ロボットやヒトの指先や表面などに貼り付けて利用できる触覚センサやフレキシブルデバイスなどの研究を行っています。
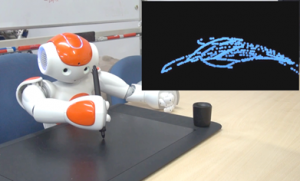
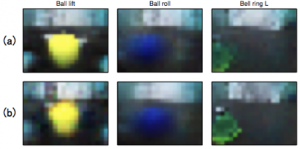
老若男女問わず誰もが日常生活において多くの道具に慣れ親しんでいます。例えば、ペンやラケットなど、道具使用においては、使い始めの時にはほとんど使用できずに苦労するものの、一度その能力が身についた後においては、道具操作に注意を向けなくてもその道具を自在に扱えたり、道具を介してそのまま対象を知覚するような経験が日常的に生じています。このような、道具と身体とが組織化する経験は、「道具へ身体が拡張している」や「道具が身体化している」などと言い表されており、道具の身体化現象は道具使用における理想的な状況として捉えられることも多いです。上杉研究室では道具の身体化現象の特性を踏まえ、行為のパフォーマンスの可能性を高めるために、道具使用による経験を拡張するデザインの問題に取り組んでいます。
一般に医療の世界では客観的データに基づく治療として、Evidence Based Medicine (EBM) というキーワードが使われていますが、本研究室では工学的に取得されたデータを臨床医に提供する Another EBM, Engineering Based Medicine を提唱しています。人工臓器にかぎらず、工学の技術を活かせるフィールドは広く、心臓血管系のモデリング・シミュレーション、 手術とレージングシステム、ナビゲーションシステム、診断支援システム等、研究範囲は多岐にわたっています。
大谷研究室(創造理工学研究科 総合機械工学専攻)
大谷研究室では、ロボットの視覚機能の実現を目指した研究を行っています。人間とロボットが共存する環境において、移動するロボットに搭載されたカメラにより移動する物体(人間)を検出する技術や、カメラ画像から手術の状況を認識する看護師ロボット、手術ナビゲーションのための画像処理技術などの研究に取り組んでいます。
尾形研究室では、人間の認知発達プロセスに着目し、人間と長期間に渡ってコミュニケーションを創発し続けるロボットの開発を目指しています。具体的には、生物の学習システムである神経回路モデルに代表される機械学習の仕組みを用い、ロボットが、複雑かつ変化に富んだ環境とのインタラクションを学習していくシステムの実現を目的として研究を行っています。
か行
勝田研究室(環境・エネルギー研究科 環境・エネルギー専攻)
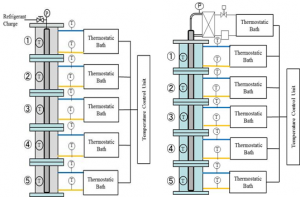
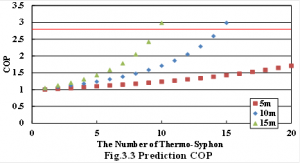
勝田研究室では、環境に調和した熱システムの研究を行っています。寒冷地用の高性能 CO 2 HP 式温水暖房・給湯システム開発を目的とした地中熱を利用した CO₂ 冷凍サイクルのシミュレーション構築と性能評価、スーパー・レストランを対象とした分散電源における排熱利用技術開発などを行っています。
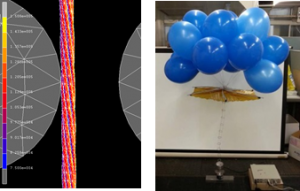
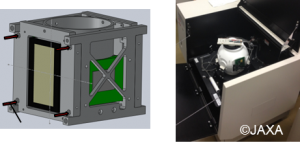
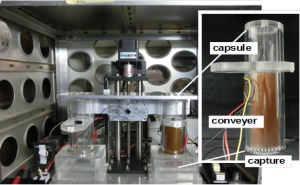
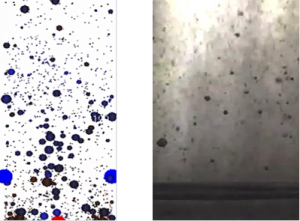
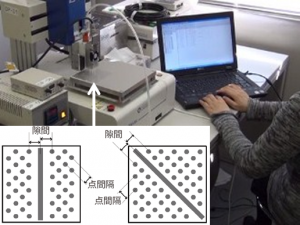
地球外の天体からその一部分を地球へと持ち帰るサンプルリターンは、太陽系の発達や生命の起源の研究の一助になると考えられています。このサンプルリターンを実行し、2010 年に地球に帰還した“ はやぶさ ” はホーン上部から惑星表面に向かって弾丸を発射し、着弾した際に巻き上げられる粒子を回収する方式でした。この機構では小惑星の表面状態に左右されない粒子採取が可能ですが、制御の難しさから本番では弾丸は発射されませんでした。そこで川本研究室では単純構造で信頼性の高い、静電力を利用した粒子採取システムを開発しました。
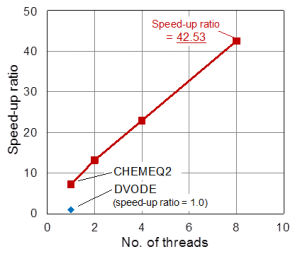
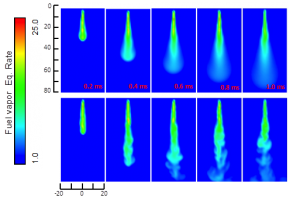
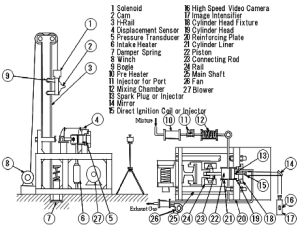
草鹿研究室では一層の高効率化が求められる内燃機関を短時間・高効率に開発するための数値シミュレーションモデルを開発しています。内燃機関は燃焼形態によって火炎伝播燃焼、ディーゼル燃焼の2方式に大きく分けられます。最終的にこの2方式を統一モデルで表現することを念頭に置きながら、計算コードの高速化および2方式それぞれにおいて燃焼特性、排出ガス特性をより高精度に予測するための改善を行いました。
小林研究室では、コミュニケーションロボットやヒューマン・インタフェース等の知覚情報システムのための新たな基板技術を研究しています。研究テーマは、音声信号処理、画像情報処理、自然言語処理、会話戦略、ヒューマンインタフェース、統計的モデリングなど多岐にわたっています。
菅野研究室では、知能機械に関する研究開発を行っています。超高齢社会において高齢者の日常生活を支援する人間共存ロボットのプラットフォーム “TWENDY-ONE” や、ハードウェアの自己保存の実現のために人工血液循環器系システムを備えた”WAMOEBA-4″、二次災害の危険性の高い震災現場などでの救助作業や復旧作業を支援する次世代建設作業ロボットに関する研究、複雑な環境下で働く知能ロボットが自らの行動経験に基づき学習をするメカニズムなどの研究に取り組んでいます。

た行
大聖研究室(環境・エネルギー研究科 環境・エネルギー専攻)
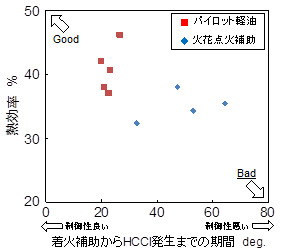
内燃機関は一層の低燃費化・クリーン化が求められており、大聖研究室ではそれらを同時に達成するための新燃焼法の提案を行っています。その1つとして、近年のシェールガス革命によって可採年数が大幅に延びるものと予想される天然ガスを用いた新燃焼法の開発に取り組んでいます。
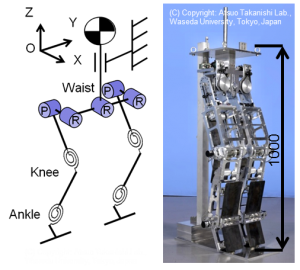
高西研究室(創造理工学研究科 総合機械工学専攻・先進理工学研究科 生命理工学専攻)
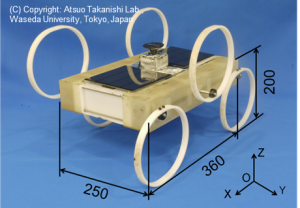
高西研究室では、大きく分けて 2 つの研究を進めています。1 つは人間の工学的な解明を目指すヒューマノイドロボットに関する研究であり、これまでに、人間が骨盤の回旋運動を巧みに利用して歩行していることに注目し、ロボットにも骨盤に相当する自由度を設けることで、膝を伸ばした人間らしい歩行を実現しています。もう 1 つの研究はロボット技術の実社会への応用に関する研究です。たとえば、環境への社会的関心の高まりを受けて、屋外で移動可能な環境モニタリングロボットの開発に取り組んでいます。
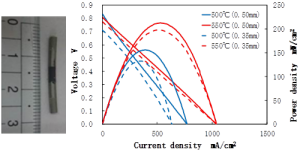
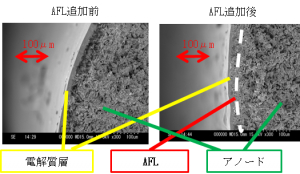
中垣研究室では、代表的な研究として、エネルギーの有効利用を目指した固体酸化物形燃料電池(SOFC) による排熱のエクセルギー再生に関する研究を進めています。
橋本研究室では、ロボティクスにおける情報処理を中心とした新たな基板技術を研究しています。研究テーマは、ロボティクス、ケミカルロボティクス、画像情報処理、音響メディア処理、メタ・アルゴリズムなど多岐にわたっています。
藤江研究室(創造理工学研究科 総合機械工学専攻・先進理工学研究科 生命理工学専攻)
藤江研究室では、21 世紀の少子高齢化社会における生活支援を目標としたロボット工学・機械工学を用いたシステム開発を行っています。これまで「医療」と「福祉」という大きく二つの観点で研究に取り組んできましたが、現在はこれらを「ヘルスケア」というより総合的な観点でとらえ、より視野の広い研究を展開しています。具体的には、病気になっても体への負担を最低限に抑えてすぐに社会復帰できるようにする低侵襲手術を支援するロボットの研究や、自身の身体能力を最大限使って生活できるように、リハビリ動作や生活動作をサポートするシステムの研究を行っています。その他にも近年では、歳を取っても健康な身体を維持するために、スポーツ障害を予防するための研究なども始めています。

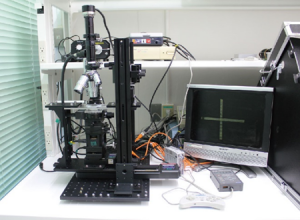
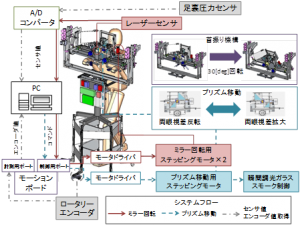
藤本研究室では、ロボティクスへの応用を目指してヒトの諸機能の特性を評価しています。具体的に、 感覚機能については主として指先の皮膚感覚機能を、一方の運動機能については主として下肢の歩行運動機能を対象として、その特性の評価を行っています。
宮氏や研究室では、機械構造物の設計支援技法の研究開発を1つの指針として研究を進めています。このため、研究テーマは機械構造物の多くに関連しており、極限環境に注目した機械構造の設計・製作・評価や衝撃荷重条件下における人体構造を含めた安全性に関するテーマについて研究を実施しています。 多様な背景や価値観を持つ人たちが現場においてひとつの目標を共有し、互いが補い合いながら生きていくことができる自他非分離的な関係性の持続的創出を「共創(Co-creation)」と呼びます。三輪研究室では、身体の働きに着目して、このような共創活動を支援する技術について研究を行っています。 山川研究室では、ロボットに関して大きく分けて2つの研究を進めています。まず1つ目の研究は、人間の腕が黄金率を持っていることを着目し、これは何らかの理由で最適化されたと推定してロボットアームの最適な関節数、リンク長、軌道を同時に求める研究です。2 つ目の研究は、鳥類や昆虫などが行っているような翼を折り畳む機構に着目し、この羽ばたき翼に折り畳み機構を追加してより実在する生物に近く、様々な局面で対応できる羽ばたき翼の設計を目的とする研究です。現代の技術の高機能、高性能化が進んでいますが、生物が持つ優れた特性を超えることができない面が数多く存在しているので、このような生物の形態と機能を研究することは重要な意義があると考えられます。 次世代パワーデバイスの IGBT チップを構成する材料が Si からSiC への以降に伴い、更なる高放熱性と高信頼性を有するパワーデバイスの設計が必要不可欠です。吉田研究室では、高放熱性と高信頼性を考慮したパワーデバイスの構造並びに構成する材料の検討を中心に、時間やコストの削減を目指す為の解析評価技術の確立を目指しています。